

AGV系统
联系我们
大连爱利斯智能装备有限公司
联系人 :王森觀 总经理助理
联系手机:13304082001
公司热线: 0411-87329315
Email :Loong_group@yeah.net
联系地址:大连市经济技术开发区淮河中路1173号
AGV系统的控制是通过物流上位调度系统、AGV地面控制系统及AGV车载控制系统三者之间的相互协作完成的,对该系统的理解,有一个非常恰当而通俗易懂的例子:
假设某市有一家出租车公司,该公司管理先进,每辆出租车都装全球定位系统(GPS),这样在公司的监控中心就可以清楚地知道每辆车的位置及行驶路线,司机可通过无线通信随时向公司汇报此时车辆的载客情况。
当有客户需要乘坐出租车时,客户可以打电话到出租车公司的客户中心,说明他当前所在的位置,以及要到达的目的地,这里,我们可将客户的电话理解为来自物流调度系统的需求,出租车公司的客户中心理解为AGV的地面控制系统,即AGV系统的上位。
客户中心收到客户的电话后,可以通过无线电话与出租车司机联系,选择离客户最近,又正好空闲的车辆A前往接客,就像AGV的地面控制系统进行的车辆和任务分配;在车辆A前往接客的途中,客户中心可能又接到报告,有空闲车辆B离客户更近,那么客户中心将及时通知车辆B去接客户,取消车辆A的任务,这就是AGV地面控制系统的动态车辆调度。客户中心对出租车将要行驶道路的交通状况也了如指掌,能够及时通知各个司机选择最便捷的道路行驶,该道路所需时间最短,但不一定是路程最短,因为,最近路程的道路上可能发生了交通阻塞,这就是AGV地面系统中所完成的路径搜索和路径分配的工作。
AGV系统的控制过程就类似这样一家管理先进的出租车公司,物流上位调度系统、AGV地面控制系统和AGV车载控制系统分别相当于客户、客户中心和出租车司机,AGV地面控制系统和各台AGV之间通过无线通信来交换信息,调度AGV的作业,并为其选择路径(线),确保交通通畅。AGV是以电池为动力的,当电量不足时,会向地面控制系统发出充电请求,在得到允许后,前往充电站自动充电,在充电期间,AGV地面控制系统不会向此AGV分配任何任务,就与出租车进了加油站不再载客一样。
曾有国外专家对AGV控制系统需解决的主要问题做了恰当的比喻:Where am I? (我在哪里?)Where am I going?(我要去哪里?) How can I get there?(我怎么去?),这三个问题归纳起来分别就是AGV控制系统中的三个主要技术:AGV的导航(Navigation),AGV的路径规划(Layout designing),AGV的导引控制(Guidance)。为了能够解决好这些问题,AGV系统的构成也必然复杂:
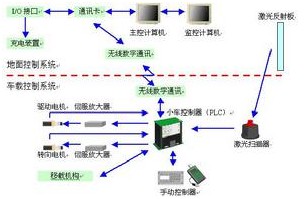
AGV控制系统分为地面(上位)控制系统、车载(单机)控制系统及导航/导引系统,其中,地面控制系统指AGV系统的固定设备,主要负责任务分配,车辆调度,路径(线)管理,交通管理,自动充电等功能;车载控制系统在收到上位系统的指令后,负责AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/导引系统为AGV单机提供系统绝对或相对位置及航向。
AGV系统是一套复杂的控制系统,加之不同项目对系统的要求不同,更增加了系统的复杂性,因此,系统在软件配置上设计了一套支持AGV项目从路径规划、流程设计、系统仿真(Simulation)到项目实施全过程的解决方案。上位系统提供了可灵活定义AGV系统流程的工具,可根据用户的实际需求来规划或修改路径或系统流程;而下位系统也提供了可供用户定义不同AGV功能的编程语言。
地面控制
AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的核心。其主要功能是对AGV系统(AGVS)中的多台AGV单机进行任务分配,车辆管理,交通管理,通讯管理等。
任务管理:任务管理类似计算机操作系统的进程管理,它提供对AGV地面控制程序的解释执行环境;提供根据任务优先级和启动时间的调度运行;提供对任务的各种操作如启动、停止、取消等。
车辆管理:车辆管理是AGV管理的核心模块,它根据物料搬运任务的请求,分配调度AGV执行任务,根据AGV行走时间最短原则,计算AGV的最短行走路径,并控制指挥AGV的行走过程,及时下达装卸货和充电命令。
交通管理:根据AGV的物理尺寸大小、运行状态和路径状况,提供AGV互相自动避让的措施,同时避免车辆互相等待的死锁方法和出现死锁的解除方法;AGV的交通管理主要有行走段分配和死锁报告功能。
通讯管理:通信管理提供AGV地面控制系统与AGV单机、地面监控系统、地面IO设备、车辆仿真系统及上位计算机的通信功能。和AGV间的通信使用无线电通信方式,需要建立一个无线网络,AGV只和地面系统进行双向通信,AGV间不进行通信,地面控制系统采用轮询方式和多台AGV通信;与地面监控系统、车辆仿真系统、上位计算机的通信使用TCP/IP通信。
车辆驱动:小车驱动负责AGV状态的采集,并向交通管理发出行走段的允许请求,同时把确认段下发AGV。
安全系统:对于载重移动机器人与活动的人员及复杂工厂环境而言,智能AGV搬运机器人的安全性是其设计的重中之重。很多企业在选择和要求AGV各种功能的时候往往忽略了AGV安全性,也有很多AGV制造厂商因为没有掌握AGV安全技术核心没有研发安全系统的团队或无法进行深度安全避障研究,贸然使用一些本来就存在安全隐患的技术和避障模块,甚至有的厂商极不负责的使用一些廉价的淘汰技术和安全产品。
车载控制
AGV车载控制系统(Onboard System),即AGV单机控制系统,在收到上位系统的指令后,负责AGV单机的导航,导引,路径选择,车辆驱动,装卸操作等功能。
导航(Navigation):AGV单机通过自身装备的导航器件测量并计算出所在全局坐标中的位置和航向。
导引(Guidance):AGV单机根据目前的位置、航向及预先设定的理论轨迹来计算下个周期的速度值和转向角度值即,AGV运动的命令值。
路径选择(Searching):AGV单机根据上位系统的指令,通过计算,预先选择即将运行的路径,并将结果报送上位控制系统,能否运行由上位系统根据其它AGV所在的位置统一调配。AGV单机行走的路径是根据实际工作条件设计的,它有若干“段”(Segment)组成。每一“段”都指明了该段的起始点、终止点,以及AGV在该段的行驶速度和转向等信息。
车辆驱动(Driving):AGV单机根据导引(Guidance)的计算结果和路径选择信息,通过伺服器件控制车辆运行。
联系手机:13304082001 公司热线: 0411-87329315 网站备案/许可证号辽ICP备13006033号-2
联系人: 王森觀 总经理助理 Email:Loong_group@yeah.net 联系地址:大连市经济技术开发区淮河中路1173号